
























预拱平台
预拱度:为抵消梁、拱、桁架等结构在荷载作用下产生的挠度,而在施工或制造时所预留的与位移方向相反的校正量。
MORE >---- 奉行为客户创造最大价值的经营理念,用完整科学的质量管理体系,为客户提供优质的产品和服务 ----
上海志荣电子科技有限公司是一家专业致力于电子衡器研制、开发、生产和销售的高新技术企业,拥有一批精干的电子衡器专业技术人才,凭借领先的技术、创新严谨的设计,精良的生产设备、完备的检测和质量保证体系,为用户提供品质卓越的志荣衡器。
公司专业制造销售15个大类标准衡器及非标称重系统,具有品种多、规格全、交货快、质量优、价格低的特点,在直接用户中具有良好的口碑。我们除了能生产常用的标准衡器外,还有极强的快速研发能力,可根据不同的需求提供有针对性的设计及产品,能满足用户的各种需求。尤其是我们拥有专利完全自主研发生产的地磅,因为产销量的迅速扩大,规模化生产后成本进一步降低,使得我们能在保证高品质的同时能以更优惠的价格推向市场。志荣公司的地磅因品种丰富与规格齐全,所以总有一款能适合您。...



数控等离子、火焰切割机(CNC Cutting Machine )就是用数字程序驱动机床运动,随着机床运动时,随机配带的切割工具对物体进行切割。这种机电一体化的切割机就称之为数控切割机
MORE >
在现代质量计量中,砝码是质量量值传递的标准量具。质量量值以保存在法国国际计量局的铂铱合金千克原器实物为唯一基准器。各国均将砝码分为国家千克基准、国家千克副基准、千克工作基准,以及由千克的倍量和分量构成的
MORE >
折弯机是一种能够对薄板进行折弯的机器,其结构主要包括支架、工作台和夹紧板,工作台置于支架上,工作台由底座和压板构成,底座通过铰链与夹紧板相连,底座由座壳、线圈和盖板组成,线圈置于座壳的凹陷内,凹陷顶部覆
MORE >
随着科技的发展与进步,地磅在各个领域中的应用越来越广泛,随着企业 计量的发展,企业对地磅的要求及性能越来越高。本文介绍数字式地磅升级前的现状及 升级后的数字式地磅的优点。
更多 >文叙述公司制造的数字式地磅在秤体、称重传感器、电气接 线上的结构特点;对安装、使用及调试过程中的一些细节情况进行了分析。
本文着重讲解如何根据相对DR或Z和V.或Y两个参数来设计称重器, 并列举了两个实例,单只传感器和四只传感器的应用。并论证了用C3级传感器可以设计 n=4000分度的衡器。DR或Z和或Y这两个参数是设计地磅的主要依据。
偏载是地磅重要的计量性能之一,角差调整是偏载调试的重要工作,本文就模拟和数字传感器如何调整角差做点说明。
数字指示秤准确度高,显示清晰直观,目前使用范围十分广泛。但在长期使用过程中,零部件磨损、老化、损坏 导致计量性能缺失,或有些企业为了满足客户的恶意要求,生产出有作弊功能的数字指示秤,严重影响了广大消费者的

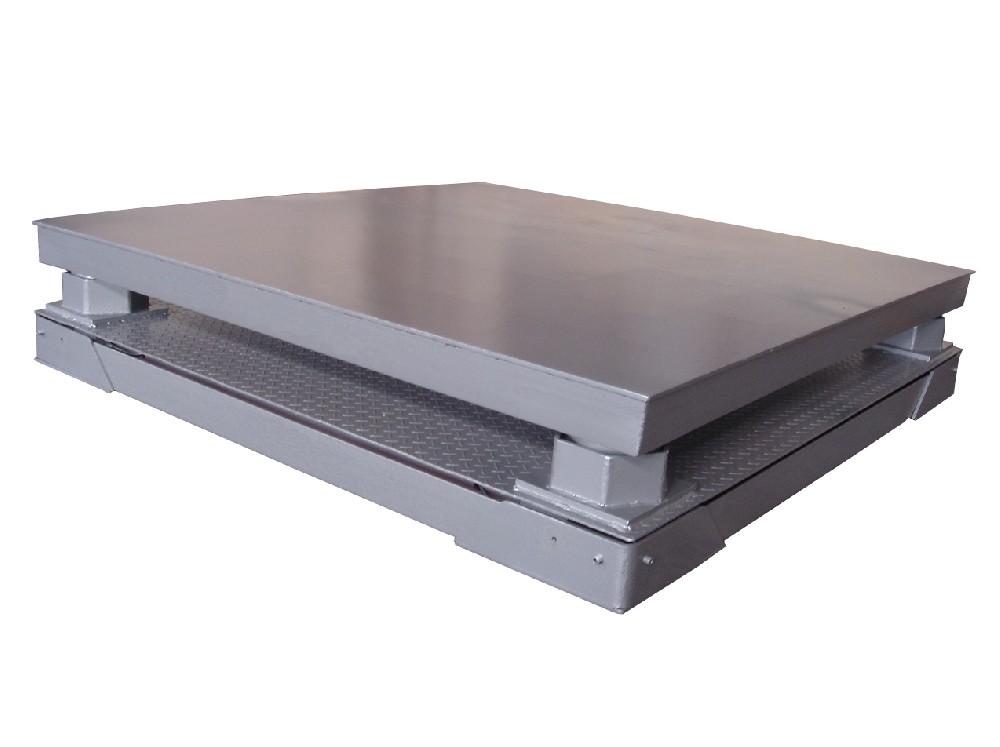
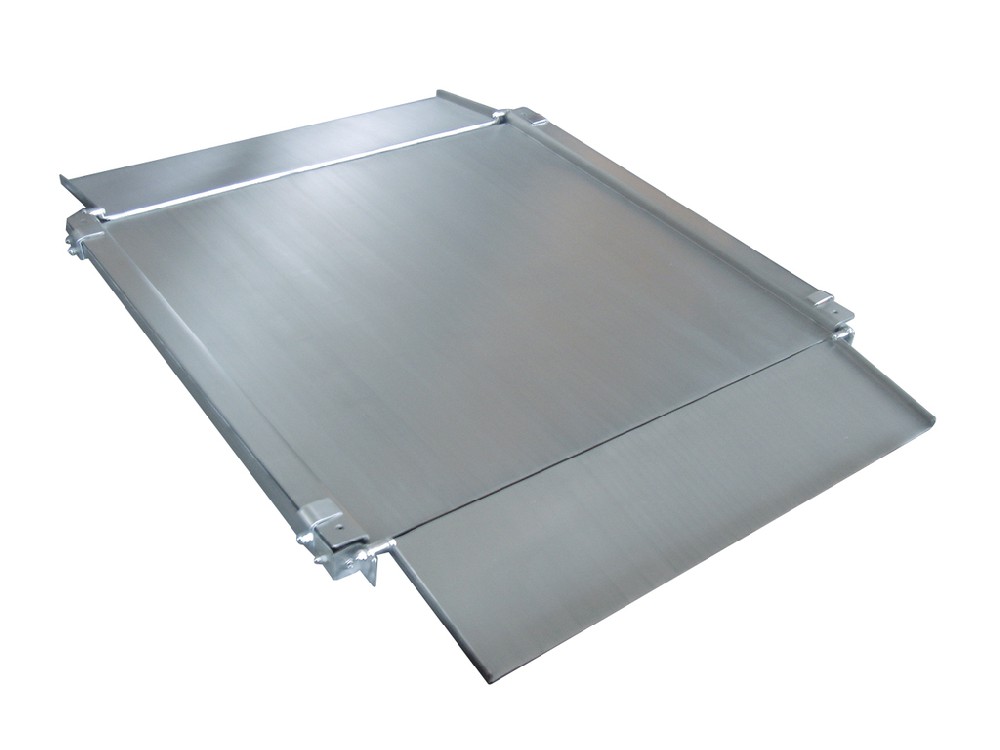
称重是许多行业的重要工作,从农业到物流,确保物品的重量是一项重要的任务,而地磅正是用于此类工作的重要称重工具。地磅是一种用于重量测量的设备,通常由秤台、负载传感器、支撑架构成。地磅的秤台由钢板组成,负载传感器可以探测负载,支撑架可以支撑负载传感器和秤台,以及其他组件。地磅的测量容量主要由负载
更多 >仪器实验室是科学研究的基础,精密天平作为重要的仪器,在实验室中占有重要地位。它可以准确地测量物体的重量,对科学研究有重要意义。精密天平的历史可以追溯到古希腊时期,当时的科学家们就开始使用精密天平来测量物体的重量,从而更好地探索物质的本质。随着时间的推移,精密天平的技术不断进步,性能也不断提高
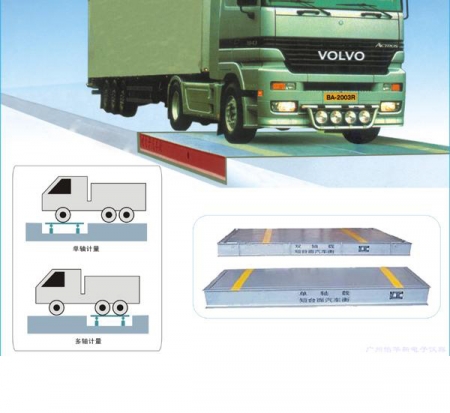
随着科技的发展,汽车衡的使用越来越普遍,短台面汽车衡成为汽车衡中的一种新型产品,能够更准确地测量汽车的总重量。短台面汽车衡由主要部件组成,其中包括一个缓冲垫,可以减少汽车在衡量时可能受到的振动;一个支撑车轮的架子,使车轮悬浮在空中,以减少车辆在衡量时可能出现的其他变形;一个信号传感器,可以监
近年来,随着我国经济的持续发展,物流行业也在经历着空前的繁荣。如今,物流行业正在不断改变着整个物流产业的发展趋势,其中,大型地磅的应用发挥着至关重要的作用。大型地磅是物流行业不可缺少的重要设备,是衡量和控制物流运输量的重要工具。它可以准确、快速地测量货物的重量,并将其记录下来,使得物流行业可
称重是许多行业的重要工作,从农业到物流,确保物品的重量是一项重要的任务,而地磅正是用于此类工作的重要称重工具。地磅是一种用于重量测量的设备,通常由秤台、负载传感器、支撑架构成。地磅的秤台由钢板组成,负载传感器可以探测负载,支撑架可以支撑负载传感器和秤台,以及其他组件。地磅的测量容量主要由负载

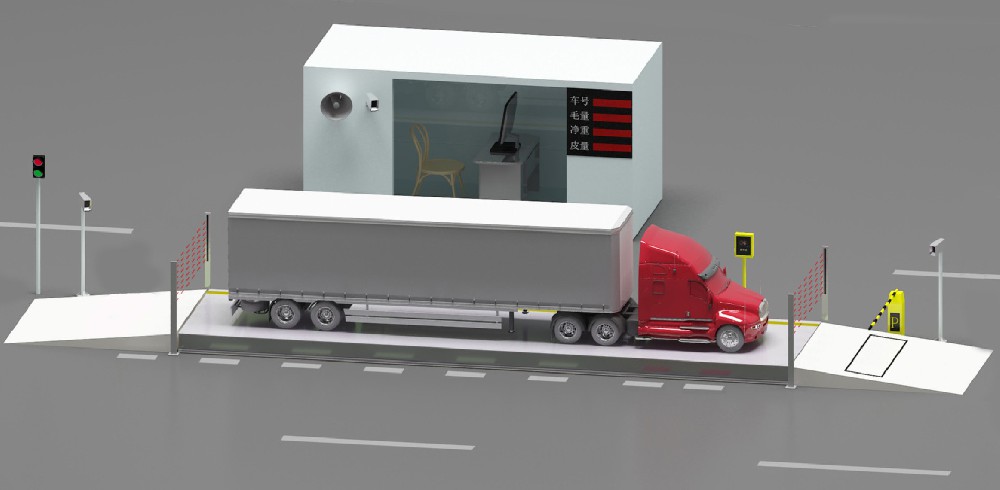
上海志荣地磅本地制造50到250吨大型数字地磅报价地磅,又称汽车衡、汽车地磅,广泛应用于工厂、现场、混凝土搅拌站、收费站等。
更多 >地磅是我们常用的用于煤炭、粮食、沙土等散装重型货物的重量检测方式,采用地磅测量重量的优点在于可以节省装袋的成本、同时避免了没袋的误差,最重要的就是保证是测量的速度。采用地磅测重量仅需几分钟就可以测出重量
汽车衡是一种新型的电子衡器,在贸易结算中起着不可或缺的作用。但是随着科技的发展汽车衡作弊现象时有发生,所以通过一些防范措施杜绝此类现象的发生。
本文公开了一种高精度电子秤量装置,由能够承载一定重量的机械天平及高精度压力传感器和单片机数据采集处理系统构成。秤重时,天平左边加配重,右端放被秤物体,配重比被秤重物体轻约压力传感器最大承载量的一半,这个
轮椅秤的概述: 电子轮椅秤: 它也具有非常重要的辅助功能:去皮功能可以准确显示新增重量,保持功能可以在体检中先照顾病患,然后读出测量结果。新型的符合人体工程学设计扶手,使该秤更加容易被病人接受。